

(Khóa học: Lập trình & Điều khiển Động Cơ từ Cơ Bản tới Nâng Cao)
📘 Giới thiệu
Ở các bài trước, xe robot của bạn đã tự tránh vật cản.
Bây giờ, chúng ta sẽ điều khiển robot thủ công bằng điện thoại, thông qua mạng WiFi của ESP32.
Bài học này giúp bạn hiểu cách tạo giao diện web đơn giản (Web Remote) để gửi lệnh điều khiển tiến – lùi – rẽ – dừng tới robot. Đây là bước đầu tiên để phát triển robot điều khiển từ xa qua Internet hoặc ứng dụng di động.
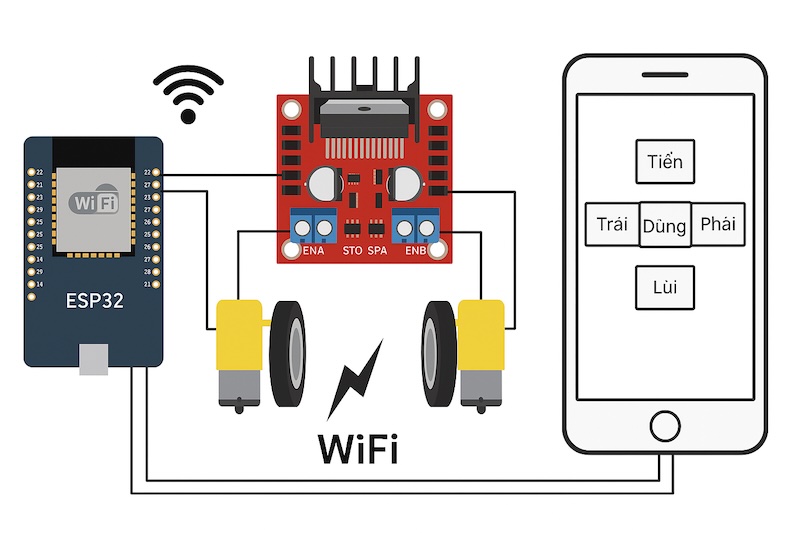
⚙️ 1. Nguyên lý hoạt động
- ESP32 hoạt động như Web Server nội bộ (Access Point hoặc STA).
- Khi bạn truy cập địa chỉ IP của ESP32 từ điện thoại, trang web hiển thị các nút:
🔼 Tiến | 🔽 Lùi | ◀️ Trái | ▶️ Phải | ⏹️ Dừng - Khi nhấn nút, lệnh được gửi qua HTTP → ESP32 nhận và điều khiển L298N → động cơ hoạt động tương ứng.
🌐 2. Sơ đồ kết nối phần cứng

| ESP32 Pin | L298N Pin | Chức năng |
|---|---|---|
| GPIO26 | IN1 | Motor trái chiều 1 |
| GPIO27 | IN2 | Motor trái chiều 2 |
| GPIO25 | IN3 | Motor phải chiều 1 |
| GPIO33 | IN4 | Motor phải chiều 2 |
| GPIO14 | ENA | PWM Motor trái |
| GPIO32 | ENB | PWM Motor phải |
| 5V, GND | L298N 5V, GND | Nối nguồn chung |
💻 3. Code mẫu: Web điều khiển xe robot qua WiFi
/*
* Bài 7 - IoTLabs Motor Course
* Điều khiển xe robot bằng Web Server qua WiFi (ESP32)
*/
#include <WiFi.h>
#include <WebServer.h>
const char* ssid = "IoTLabs_Robot";
const char* password = "12345678";
WebServer server(80);
#define IN1 26
#define IN2 27
#define IN3 25
#define IN4 33
#define ENA 14
#define ENB 32
#define PWM_FREQ 5000
#define PWM_RES 8
void setupMotors() {
pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT);
ledcSetup(0, PWM_FREQ, PWM_RES);
ledcSetup(1, PWM_FREQ, PWM_RES);
ledcAttachPin(ENA, 0);
ledcAttachPin(ENB, 1);
}
void goForward() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
ledcWrite(0, 200); ledcWrite(1, 200);
}
void goBackward() {
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH);
ledcWrite(0, 200); ledcWrite(1, 200);
}
void turnLeft() {
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
ledcWrite(0, 200); ledcWrite(1, 200);
}
void turnRight() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH);
ledcWrite(0, 200); ledcWrite(1, 200);
}
void stopMotor() {
digitalWrite(IN1, LOW); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, LOW);
ledcWrite(0, 0); ledcWrite(1, 0);
}
String htmlPage() {
String html = "<html><body style='text-align:center;'>";
html += "<h2>🚗 IoTLabs Robot Control</h2>";
html += "<button onclick=\"location.href='/forward'\">⬆ Tiến</button><br><br>";
html += "<button onclick=\"location.href='/left'\">⬅ Trái</button>";
html += "<button onclick=\"location.href='/stop'\">⏹ Dừng</button>";
html += "<button onclick=\"location.href='/right'\">Phải ➡</button><br><br>";
html += "<button onclick=\"location.href='/back'\">⬇ Lùi</button>";
html += "</body></html>";
return html;
}
void setup() {
Serial.begin(115200);
setupMotors();
WiFi.softAP(ssid, password);
Serial.println("Access Point Started!");
Serial.println(WiFi.softAPIP());
server.on("/", []() { server.send(200, "text/html", htmlPage()); });
server.on("/forward", []() { goForward(); server.send(200, "text/html", htmlPage()); });
server.on("/back", []() { goBackward(); server.send(200, "text/html", htmlPage()); });
server.on("/left", []() { turnLeft(); server.send(200, "text/html", htmlPage()); });
server.on("/right", []() { turnRight(); server.send(200, "text/html", htmlPage()); });
server.on("/stop", []() { stopMotor(); server.send(200, "text/html", htmlPage()); });
server.begin();
}
void loop() {
server.handleClient();
}
✅ Kết quả:
- Điện thoại kết nối WiFi:
IoTLabs_Robot→ Mở trình duyệt nhập IP (ví dụ:192.168.4.1). - Giao diện xuất hiện 5 nút điều khiển.
- Khi nhấn, robot di chuyển tương ứng theo lệnh.
🧠 4. Giải thích
WiFi.softAP()tạo mạng WiFi riêng của ESP32.WebServer server(80)khởi tạo server trên cổng 80.- Mỗi
server.on()là một endpoint cho một nút bấm. - Giao diện được sinh trực tiếp bằng HTML gửi từ ESP32.
🎯 5. Mục tiêu học tập
- Hiểu cách ESP32 tạo web server điều khiển thiết bị.
- Thiết kế giao diện điều khiển robot đơn giản qua WiFi.
- Chuẩn bị cho bài sau: Điều khiển robot qua Internet (IoT Cloud).
🧩 6. Hoạt động mở rộng
- Thêm thanh trượt (slider) điều chỉnh tốc độ PWM.
- Tích hợp hiển thị trạng thái (đang tiến/lùi/dừng) trên web.
- Thiết kế giao diện đẹp hơn với CSS hoặc Bootstrap.
📦 7. Linh kiện cần thiết
| Linh kiện | Số lượng | Ghi chú |
|---|---|---|
| ESP32 DevKit 38 Pin | 1 | Bộ điều khiển |
| L298N Motor Driver | 1 | Cầu H kép |
| Motor DC 3–6V | 2 | Trái và phải |
| Nguồn pin 7.4V hoặc 9V | 1 | Cấp nguồn động cơ |
| Điện thoại hoặc laptop | 1 | Kết nối WiFi |
🚀 8. Kết luận
Bạn đã biến xe robot thành một thiết bị IoT điều khiển qua mạng WiFi.
Khi hiểu cơ chế giao tiếp HTTP và WebServer, bạn có thể phát triển hệ thống điều khiển qua Internet hoặc tích hợp AI điều khiển bằng giọng nói.
Để lại một bình luận