

Tác giả: admin
-

Tìm Hiểu Chi Tiết Về Board ESP32 38 Pin – Cấu Tạo, Sơ Đồ Chân, Ứng Dụng
Khám phá chi tiết board ESP32 38 pin: cấu tạo, thông số kỹ thuật, sơ đồ chân, cách cấp nguồn, lập trình và các ứng dụng trong IoT, điều khiển thiết bị và cảm biến.
-
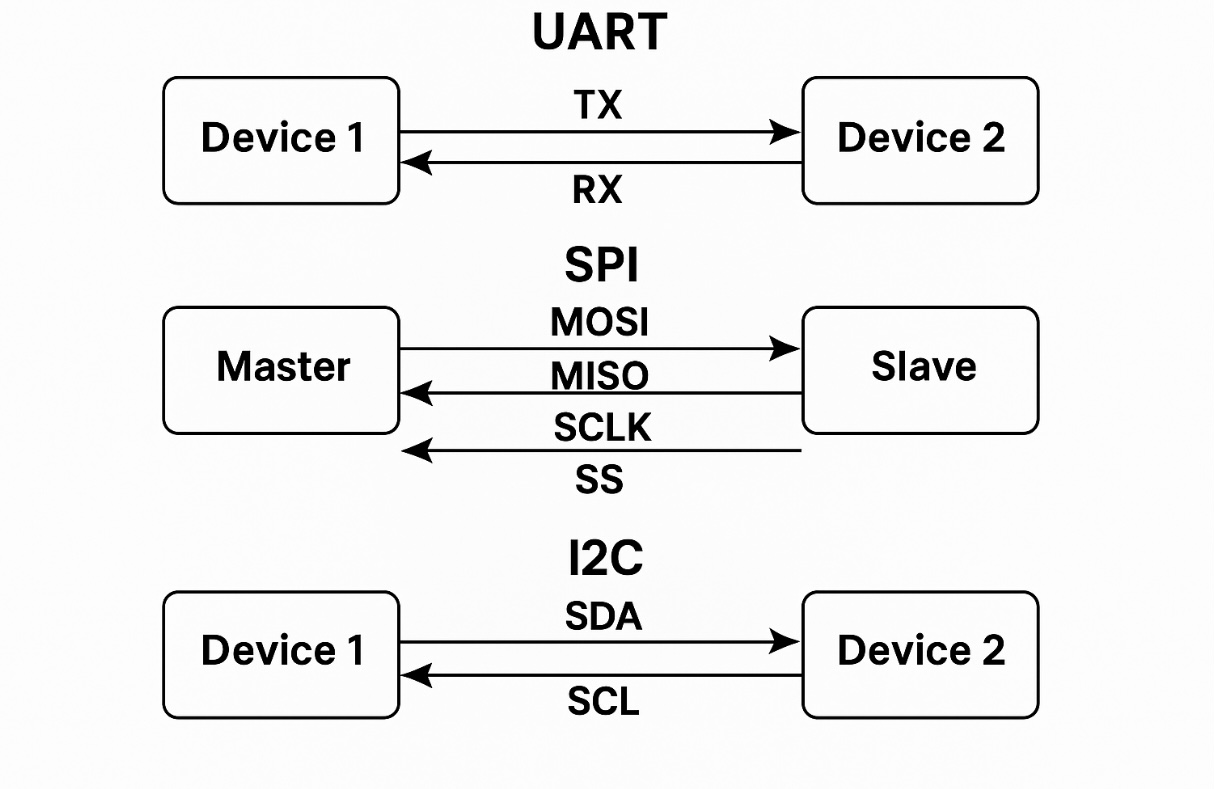
So Sánh Các Chuẩn Giao Tiếp UART, SPI, I2C – Cách Hoạt Động & Ứng Dụng Thực Tế
Tìm hiểu và so sánh ba chuẩn giao tiếp phổ biến nhất trong vi điều khiển: UART, SPI, I2C. Giải thích nguyên lý, ưu nhược điểm và ví dụ ứng dụng thực tế.
-

Tìm Hiểu Nguyên Lý UART – Giao Tiếp Nối Tiếp Trong Vi Điều Khiển
Tìm hiểu giao tiếp UART là gì, nguyên lý hoạt động, cấu trúc, và cách truyền dữ liệu giữa ESP32, Arduino, các module và máy tính.
-

Hướng dẫn cấp nguồn pin cho dự án điện tử, Arduino, ESP32 – Hiểu Đúng Để Mạch Ổn Định
Tìm hiểu cách chọn và cấp nguồn pin đúng cho các dự án Arduino, ESP32. Hướng dẫn chi tiết về pin 3.7V, mạch sạc, hạ áp và lưu ý an toàn khi cấp nguồn.
-

Mạch cầu H L298N là gì? Nguyên lý hoạt động và cách điều khiển động cơ DC
Tìm hiểu mạch cầu H L298N – module điều khiển động cơ DC phổ biến giúp đảo chiều và điều chỉnh tốc độ động cơ.
-
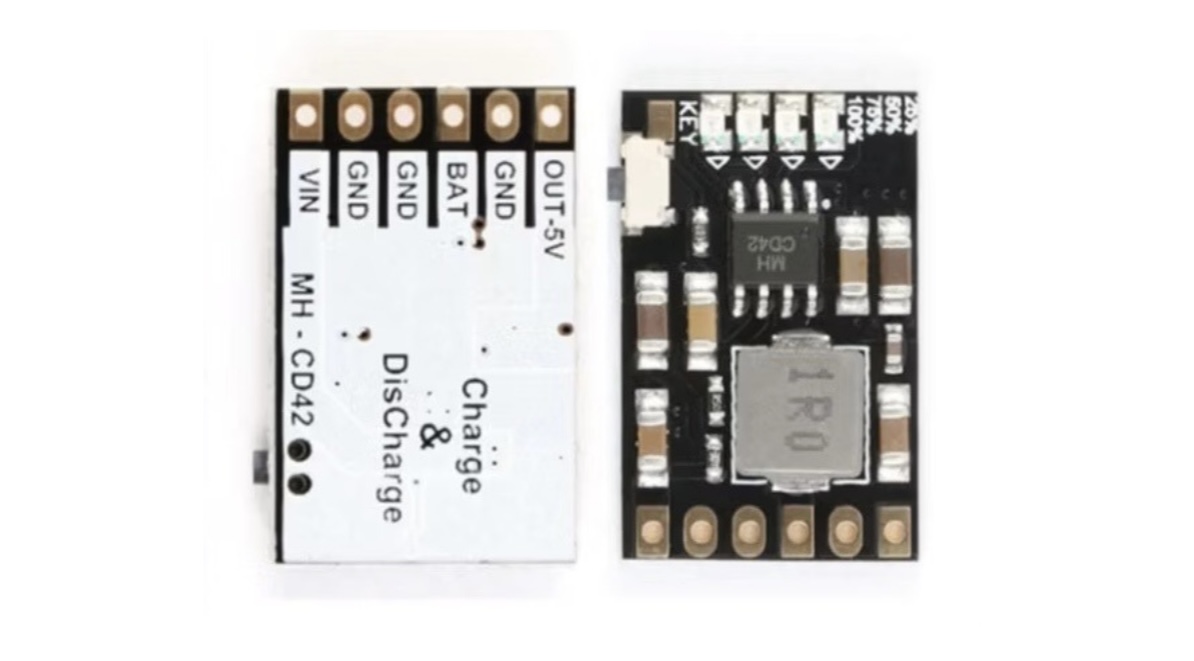
Hướng dẫn sử dụng mạch sạc – xả pin Li-ion MH-CD42 cho ESP32
Tìm hiểu cách dùng mạch MH-CD42 để sạc và cấp nguồn 5V cho ESP32. Hướng dẫn chi tiết, dễ hiểu, có sơ đồ và mẹo an toàn.
-
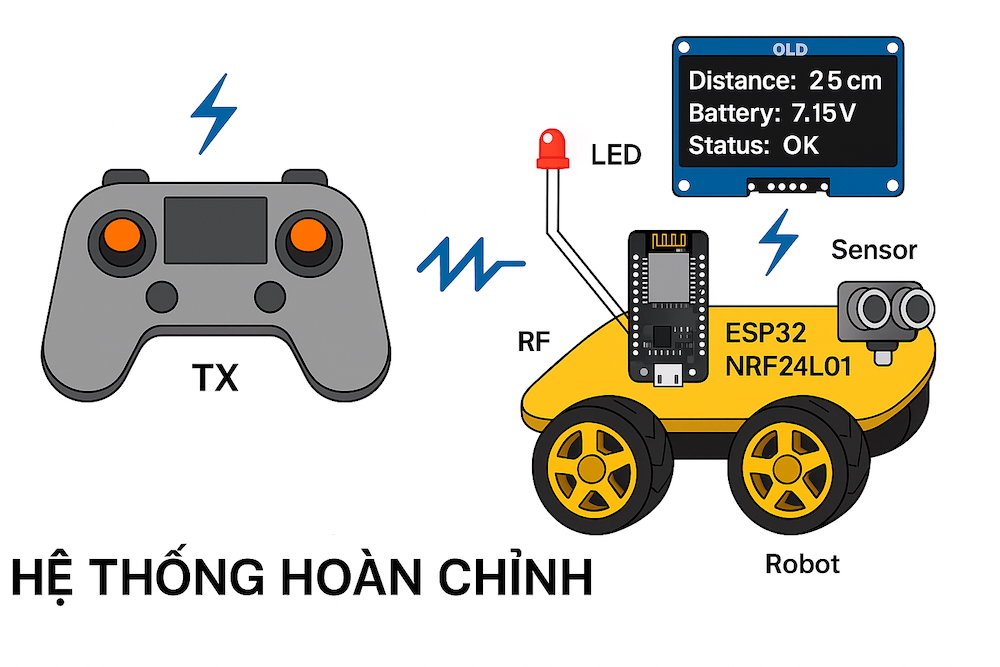
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 7): Kiểm thử & demo thực tế
Bài học hướng dẫn kiểm thử và demo thực tế hệ thống robot điều khiển từ xa dùng NRF24L01. Bao gồm truyền 2 chiều, báo hiệu thông minh, và tối ưu phản hồi điều khiển trong môi trường thực tế.
-
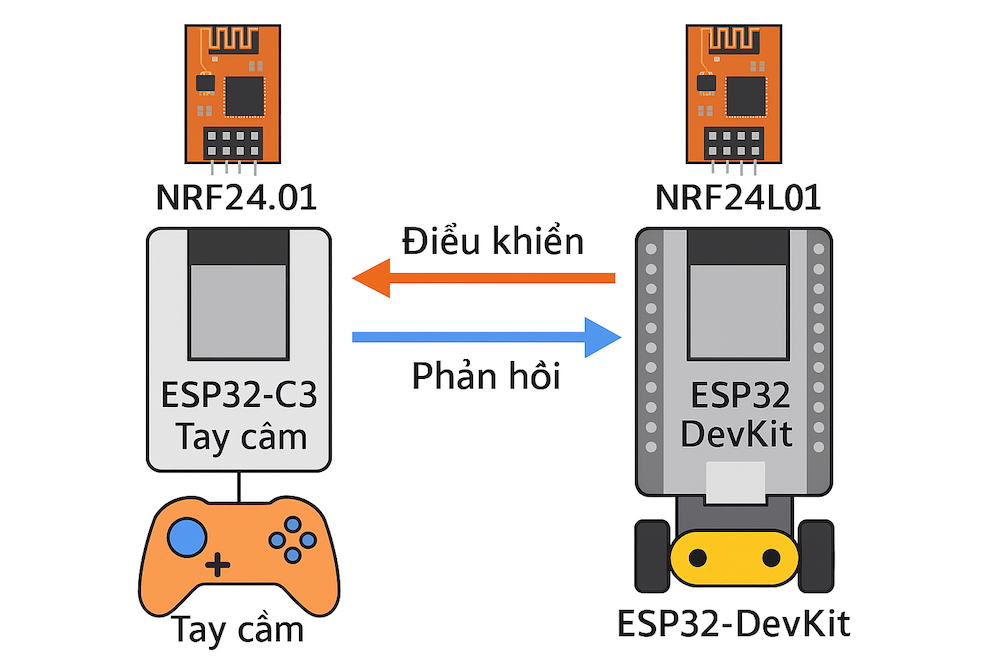
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 6): Truyền dữ liệu 2 chiều
Bài học hướng dẫn cách lập trình truyền dữ liệu hai chiều giữa tay cầm và robot dùng NRF24L01. Robot gửi dữ liệu cảm biến và pin về tay cầm giúp điều khiển thông minh hơn.
-
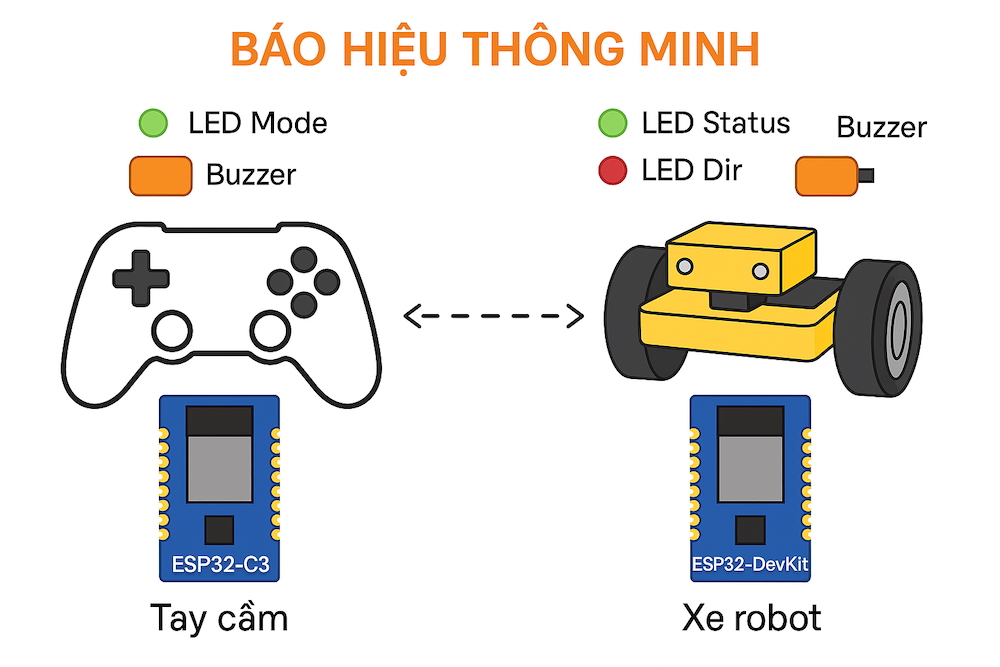
Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 5): Báo hiệu thông minh
Bài học hướng dẫn thêm hệ thống báo hiệu thông minh bằng LED và buzzer cho robot điều khiển từ xa. Robot có thể phản hồi trạng thái hoạt động, mất kết nối và chế độ điều khiển.
-

Lập trình & Điều khiển Động Cơ – Nâng cao – Bài 16: Thiết kế bộ điều khiển từ xa cho Robot (phần 4): Tối ưu điều khiển
Bài học hướng dẫn tối ưu điều khiển robot từ xa dùng NRF24L01. Giúp xe chạy mượt, ổn định và phản hồi nhanh nhờ kỹ thuật Soft Start, Dead Zone và chế độ Kid/Sport.