

Tác giả: admin
-
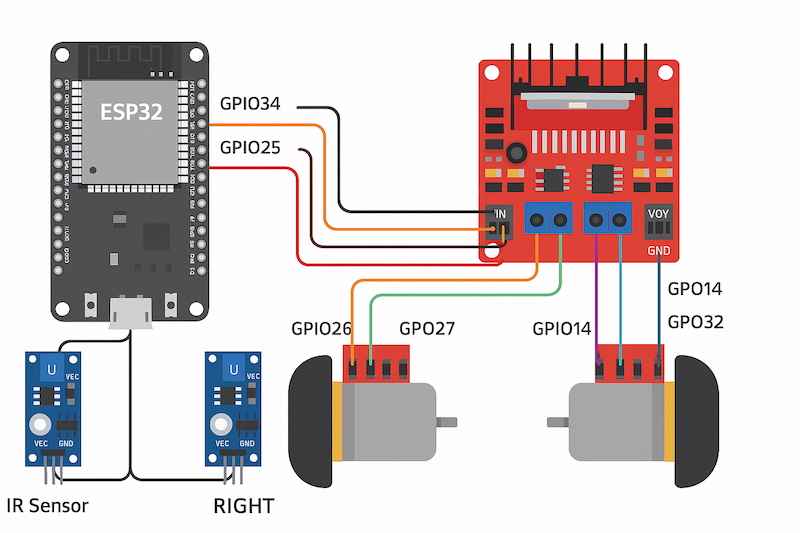
Lập trình & Điều khiển Động Cơ – Bài 9: Lập trình xe robot dò line (chạy theo vạch đen)
Bài 9 hướng dẫn lập trình xe robot dò line giúp robot tự động bám theo đường đi bằng ESP32, cảm biến hồng ngoại IR, mạch cầu H L298N.
-

Lập trình & Điều khiển Động Cơ – Bài 8: Điều khiển xe robot bằng Bluetooth từ điện thoại (ESP32 + App Android)
Bài 8 hướng dẫn kết nối điện thoại, lập trình nhận lệnh và điều khiển động cơ qua Bluetooth, giúp bạn làm chủ việc điều khiển robot không dây.
-
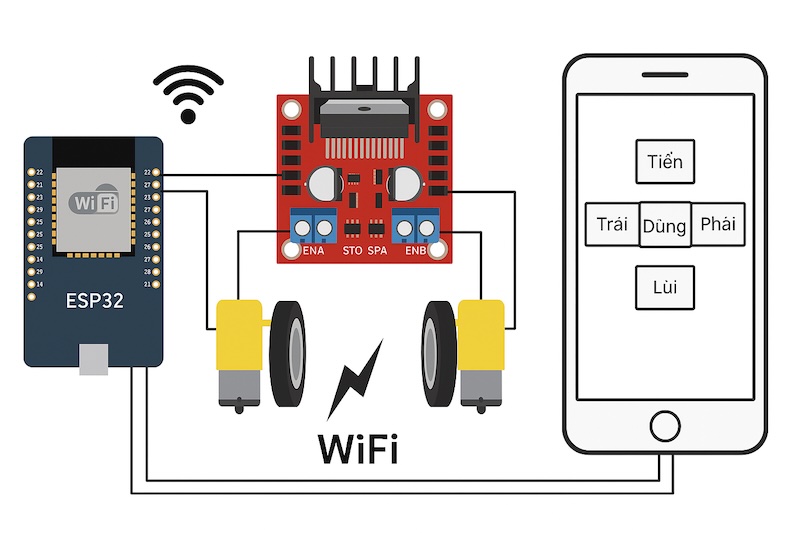
Lập trình & Điều khiển Động Cơ – Bài 7: Điều khiển xe robot bằng điện thoại qua WiFi (Web Remote)
Bài 7 hướng dẫn lập trình xe robot điều khiển bằng điện thoại qua WiFi bằng ESP32. Bạn sẽ tạo web điều khiển có nút tiến, lùi, rẽ và dừng để điều khiển robot từ xa qua điện thoại.
-
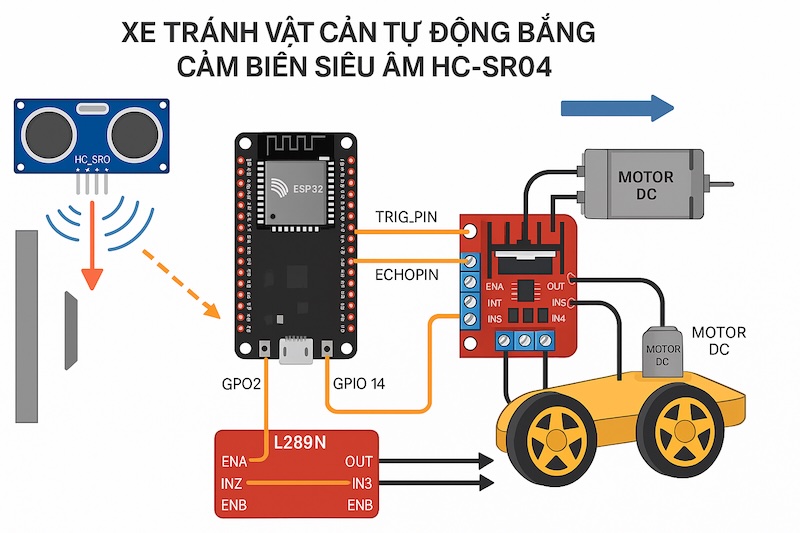
Lập trình & Điều khiển Động Cơ – Bài 6: Xe tránh vật cản tự động bằng cảm biến siêu âm HC-SR04
Bài 6 hướng dẫn lập trình xe robot tự tránh vật cản thông minh, linh hoạt bằng cảm biến siêu âm HC-SR04, sử dụng ESP32 và L298N.
-
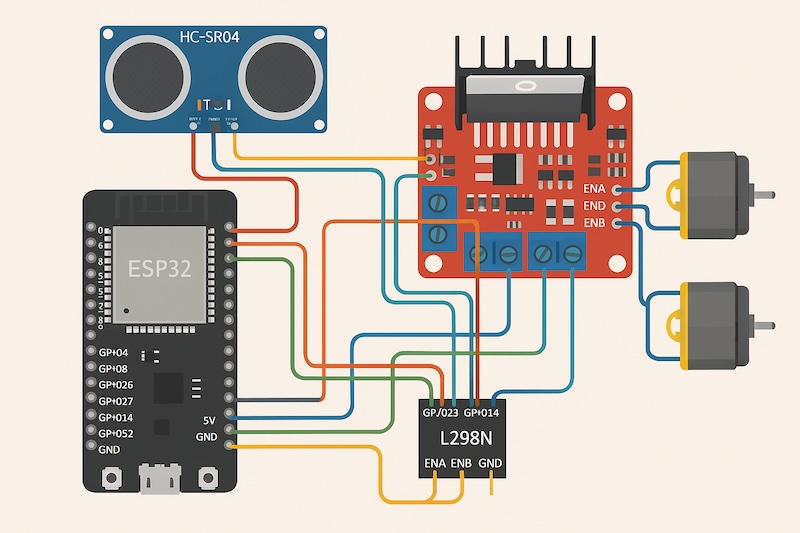
Lập trình & Điều khiển Động Cơ – Bài 5: Cảm biến vật cản cho xe robot (Tự dừng khi gặp chướng ngại vật)
Bài 5 hướng dẫn chi tiết cách dùng cảm biến siêu âm HC-SR04 để phát hiện vật cản và lập trình xe robot tránh chướng ngại vật thông minh.
-
Lập trình & Điều khiển Động Cơ – Bài 4: Viết hàm điều khiển chuyển động cho xe robot
Bài 4 hướng dẫn viết hàm điều khiển chuyển động cho xe robot hai bánh bằng ESP32 và L298N, bao gồm các hướng tiến, lùi, rẽ trái, rẽ phải và dừng.
-

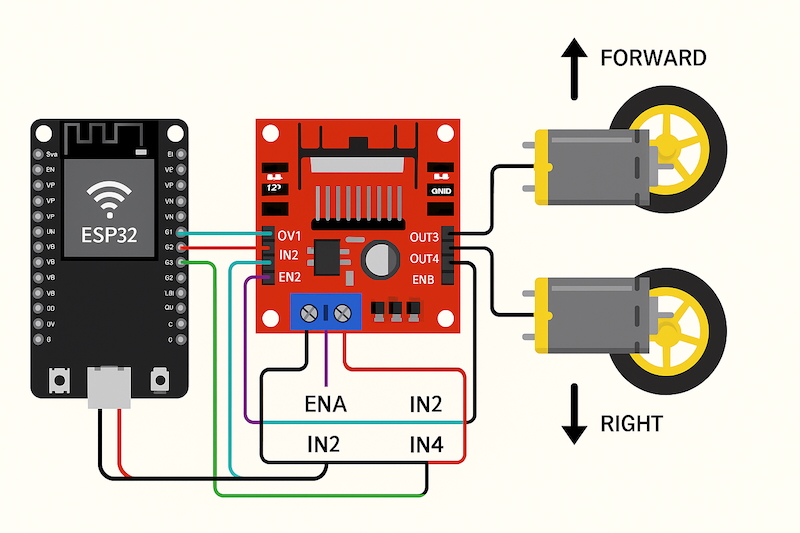
Lập trình & Điều khiển Động Cơ – Bài 3: Đảo chiều quay của động cơ DC bằng mạch cầu H (L298N)
Bài 3 hướng dẫn cách đảo chiều quay động cơ DC bằng mạch cầu H L298N trên ESP32, giúp robot có thể di chuyển linh hoạt với các hướng tiến, lùi, rẽ trái và rẽ phải.
-
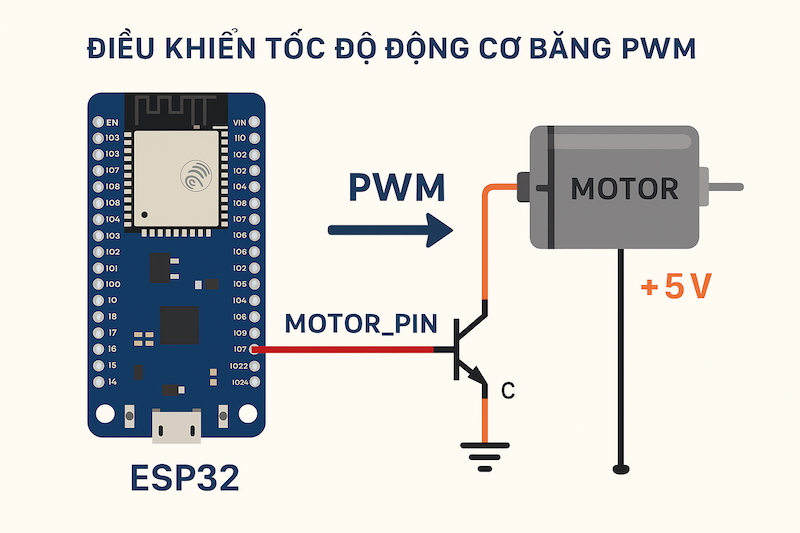
Lập trình & Điều khiển Động Cơ – Bài 2: Điều khiển tốc độ Động cơ DC bằng PWM
Bài 2 hướng dẫn cách điều khiển tốc độ động cơ DC bằng PWM trên ESP32, giúp bạn hiểu nguyên lý điều chế độ rộng xung và thực hành tạo chuyển động mượt mà cho robot.
-
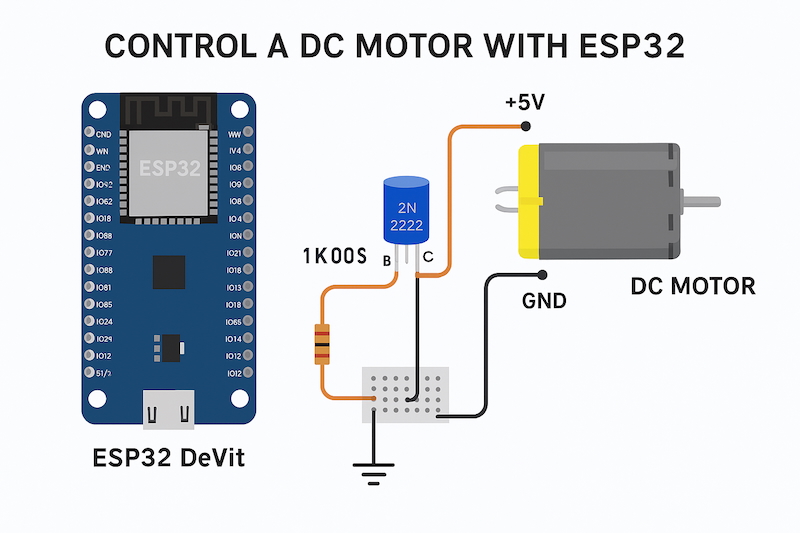
Lập trình & Điều khiển Động Cơ – Bài 1: Giới thiệu về Động cơ và Nguyên lý Hoạt động
Bài học đầu tiên trong khóa “Lập trình & Điều khiển Động Cơ” giúp bạn hiểu nguyên lý hoạt động của động cơ DC, phân biệt các loại động cơ và thực hành điều khiển động cơ bằng ESP32 DevKit 38 Pin.
-
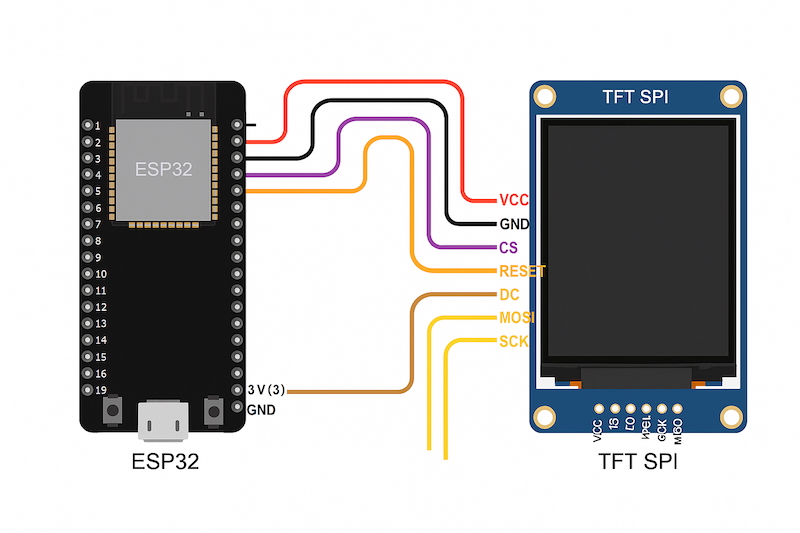
Lập trình ESP32 – Bài 14: Hiển thị màn hình TFT (SPI)
Hướng dẫn kết nối và lập trình màn hình TFT SPI (như ILI9341, ST7735, ST7789) với ESP32. Bài viết giải thích nguyên lý SPI, cung cấp sơ đồ kết nối, mã ví dụ hiển thị văn bản, đồ họa và hình ảnh.