

Lập trình và Điều khiển động cơ từ cơ bản tới nâng cao
Khoá học giúp bạn, hiểu rõ nguyên lý hoạt động của các loại động cơ (DC, Servo, Stepper). Biết cách điều khiển động cơ bằng vi điều khiển (ESP32 / Arduino). Ứng dụng lập trình để tạo ra chuyển động có điều kiện, chuyển động tự động, và các dự án robot thực tế. Nâng cao tư duy logic, lập trình hướng hành vi và tư duy điều khiển (control thinking).
-
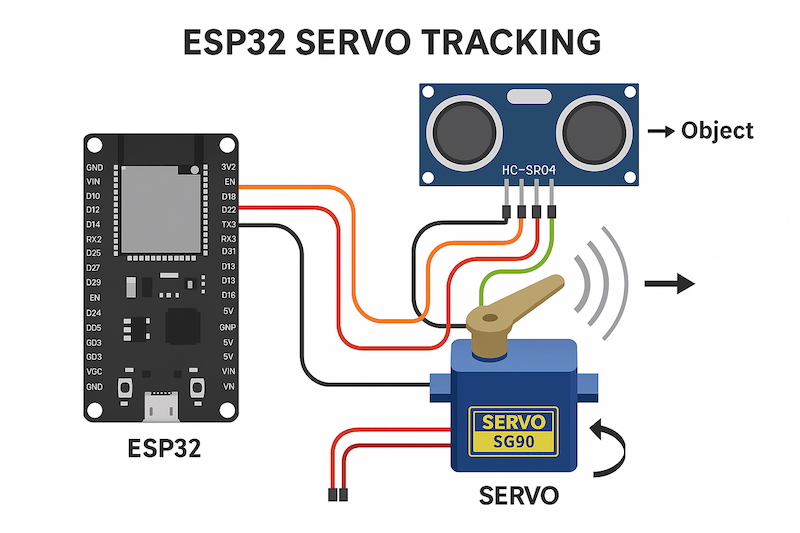
Lập trình & Điều khiển Động Cơ – Bài 13: Servo Tracking, tạo hệ thống đầu quay cảm biến tự động theo vật cản
Bài 13 hướng dẫn tạo hệ thống servo tracking, giúp cảm biến HC-SR04 tự động quay theo vật cản gần nhất bằng ESP32, mô phỏng đầu robot biết “nhìn theo” mục tiêu.
-
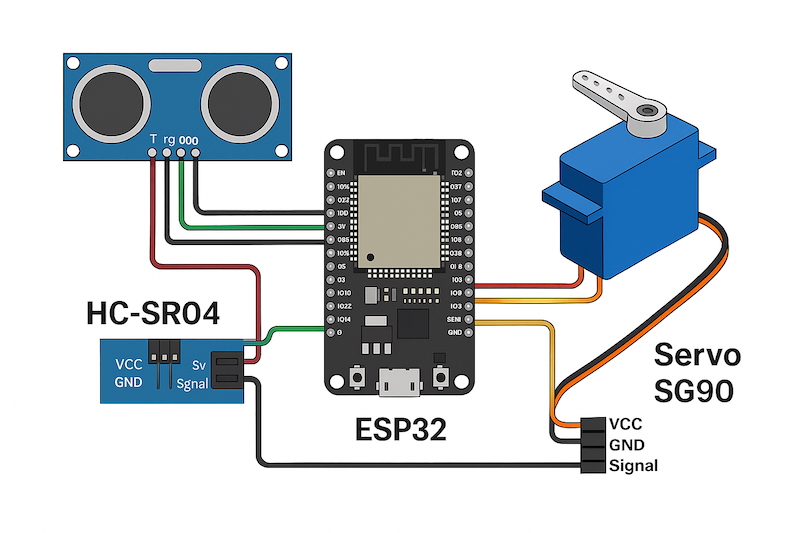
Lập trình & Điều khiển Động Cơ – Bài 12: Kết hợp Servo và Cảm biến siêu âm HC-SR04 – Quay theo vật cản (Radar mini)
Bài 12 hướng dẫn kết hợp Servo SG90 và cảm biến siêu âm HC-SR04 để tạo radar mini, giúp robot quét góc 180° và đo khoảng cách theo từng hướng.
-
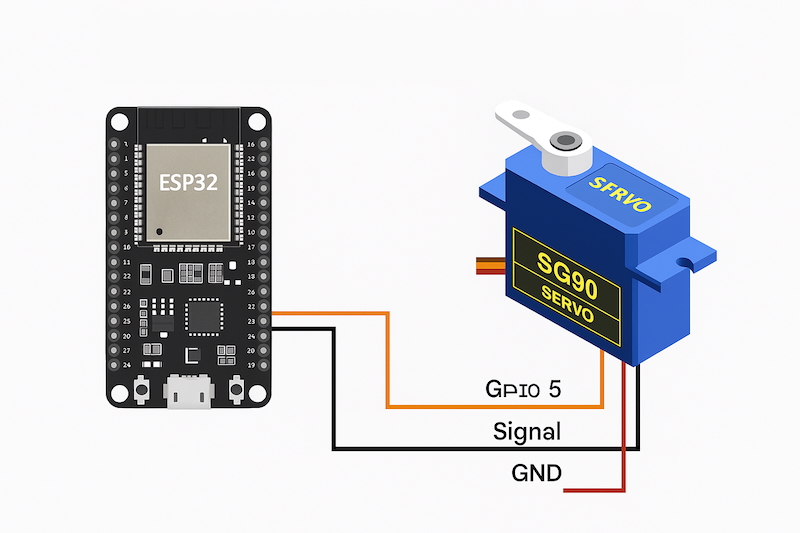
Lập trình & Điều khiển Động Cơ – Bài 11: Điều khiển Servo bằng ESP32 (Cơ bản và Ứng dụng trong robot)
Bài 11 hướng dẫn điều khiển Servo SG90 bằng ESP32, từ nguyên lý PWM đến ứng dụng điều khiển góc quay 0°–180° trong các dự án robot thực tế.
-
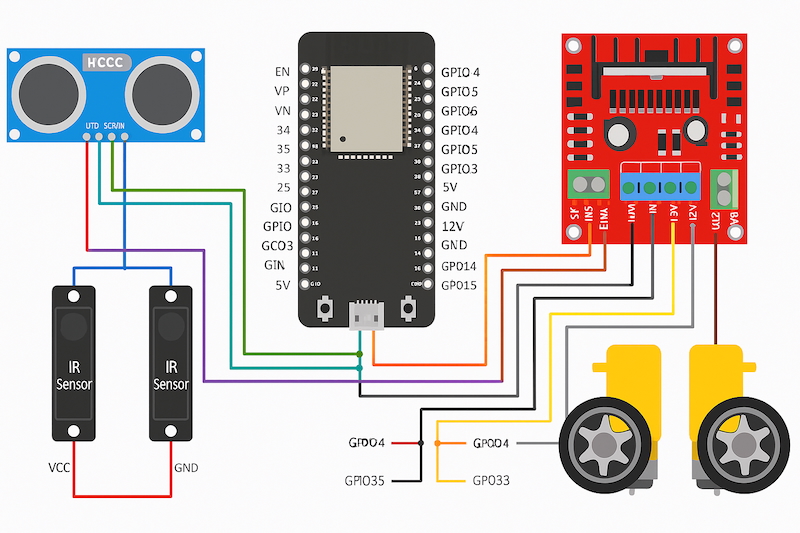
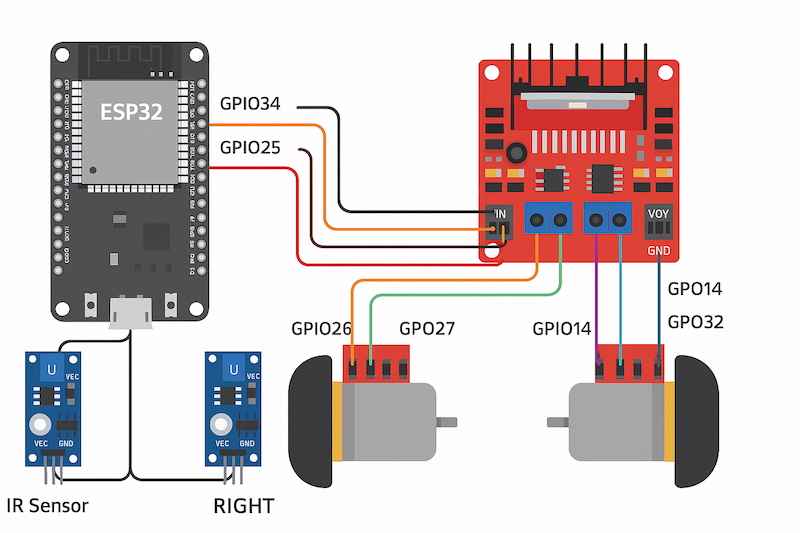
Lập trình & Điều khiển Động Cơ – Bài 10: Xe robot tránh vật cản kết hợp dò line (robot tự hành thông minh)
Bài 10 hướng dẫn lập trình xe robot thông minh vừa dò line vừa tránh vật cản bằng ESP32, HC-SR04 và cảm biến hồng ngoại, giúp robot tự hành thông minh hơn.
-
Lập trình & Điều khiển Động Cơ – Bài 9: Lập trình xe robot dò line (chạy theo vạch đen)
Bài 9 hướng dẫn lập trình xe robot dò line giúp robot tự động bám theo đường đi bằng ESP32, cảm biến hồng ngoại IR, mạch cầu H L298N.
-

Lập trình & Điều khiển Động Cơ – Bài 8: Điều khiển xe robot bằng Bluetooth từ điện thoại (ESP32 + App Android)
Bài 8 hướng dẫn kết nối điện thoại, lập trình nhận lệnh và điều khiển động cơ qua Bluetooth, giúp bạn làm chủ việc điều khiển robot không dây.
-
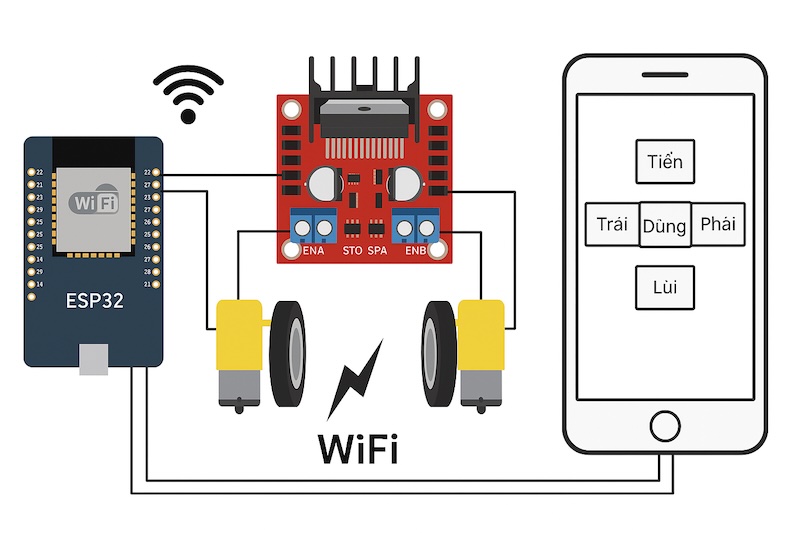
Lập trình & Điều khiển Động Cơ – Bài 7: Điều khiển xe robot bằng điện thoại qua WiFi (Web Remote)
Bài 7 hướng dẫn lập trình xe robot điều khiển bằng điện thoại qua WiFi bằng ESP32. Bạn sẽ tạo web điều khiển có nút tiến, lùi, rẽ và dừng để điều khiển robot từ xa qua điện thoại.
-
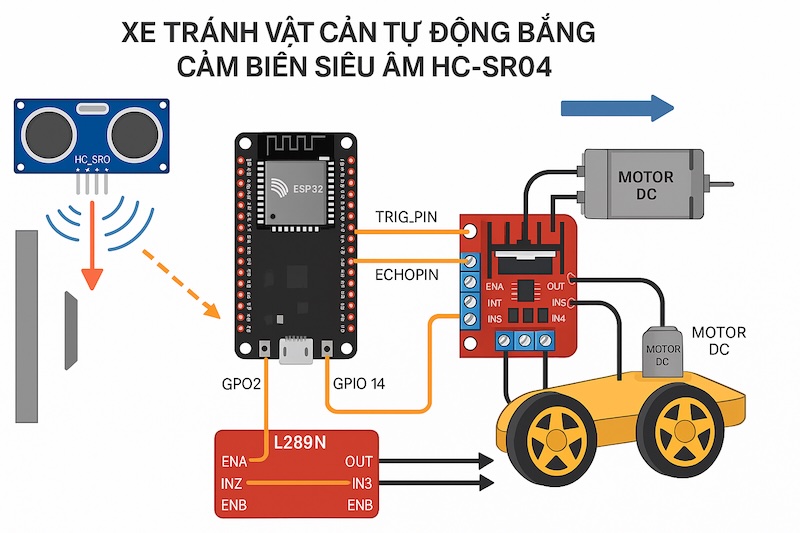
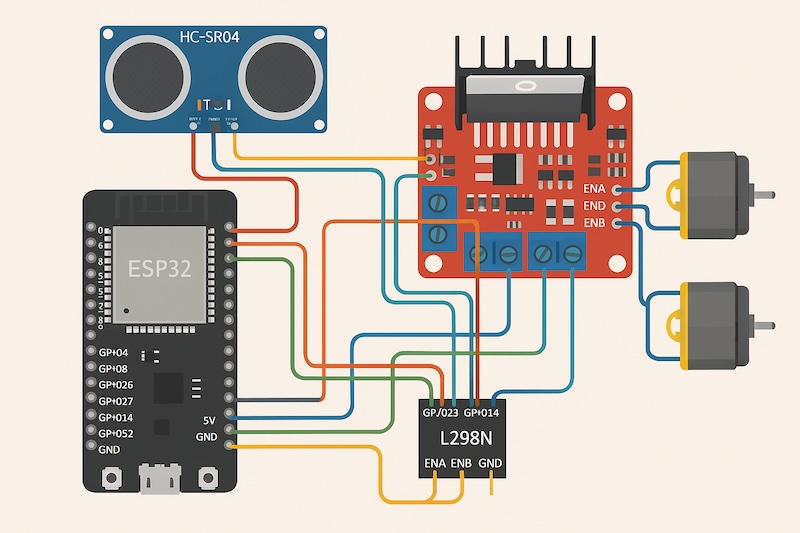
Lập trình & Điều khiển Động Cơ – Bài 6: Xe tránh vật cản tự động bằng cảm biến siêu âm HC-SR04
Bài 6 hướng dẫn lập trình xe robot tự tránh vật cản thông minh, linh hoạt bằng cảm biến siêu âm HC-SR04, sử dụng ESP32 và L298N.
-
Lập trình & Điều khiển Động Cơ – Bài 5: Cảm biến vật cản cho xe robot (Tự dừng khi gặp chướng ngại vật)
Bài 5 hướng dẫn chi tiết cách dùng cảm biến siêu âm HC-SR04 để phát hiện vật cản và lập trình xe robot tránh chướng ngại vật thông minh.
-
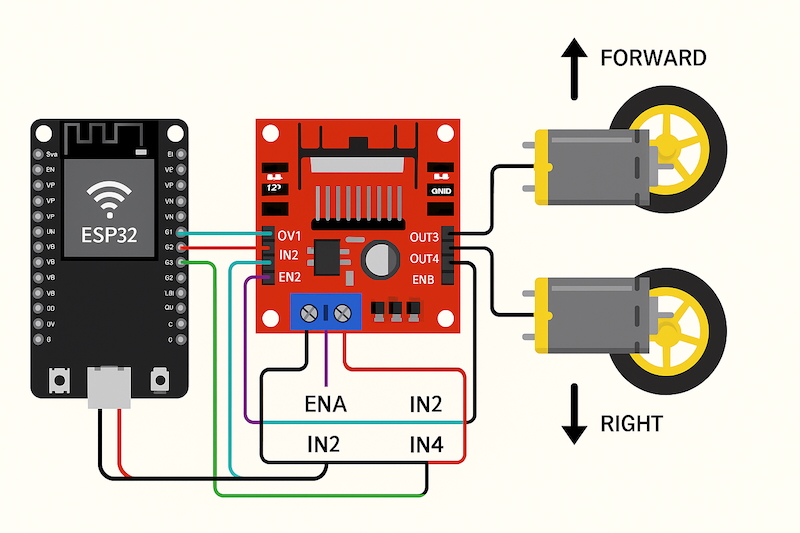
Lập trình & Điều khiển Động Cơ – Bài 4: Viết hàm điều khiển chuyển động cho xe robot
Bài 4 hướng dẫn viết hàm điều khiển chuyển động cho xe robot hai bánh bằng ESP32 và L298N, bao gồm các hướng tiến, lùi, rẽ trái, rẽ phải và dừng.