

(Khóa học: Lập trình & Điều khiển Động cơ từ Cơ bản tới Nâng Cao)
Giới thiệu
Trong thế giới robot và IoT, động cơ điện là “trái tim” giúp các thiết bị có thể chuyển động. Từ cánh quạt, bánh xe cho đến tay robot, mọi chuyển động đều bắt đầu từ động cơ. Ở bài học đầu tiên này, chúng ta sẽ tìm hiểu về nguyên lý hoạt động của động cơ DC, các loại động cơ phổ biến và cách điều khiển một động cơ đơn giản bằng ESP32 DevKit 38 Pin.
1. Khái niệm về Động cơ Điện
Động cơ là thiết bị chuyển đổi năng lượng điện thành năng lượng cơ học. Khi dòng điện chạy qua cuộn dây trong động cơ, nó tạo ra từ trường làm quay trục – chính là nguyên lý hoạt động của hầu hết các động cơ điện.
2. Các loại động cơ phổ biến trong IoT và Robot
| Loại động cơ | Đặc điểm chính | Ứng dụng thực tế |
|---|---|---|
| Động cơ DC | Quay liên tục khi có dòng điện, tốc độ phụ thuộc điện áp | Xe robot, quạt mini, bơm nước |
| Động cơ Servo | Quay theo góc cố định 0–180°, chính xác cao | Tay robot, camera, servo gật đầu |
| Động cơ Stepper | Quay từng bước nhỏ, kiểm soát chính xác vị trí | Máy in 3D, CNC, bàn xoay |
💡 Mỗi loại động cơ có ưu nhược điểm khác nhau, vì vậy kỹ sư cần chọn loại phù hợp với ứng dụng thực tế.
3. Nguyên lý cơ bản của động cơ DC
Khi cấp điện cho động cơ DC, cuộn dây bên trong sinh ra từ trường → đẩy nam châm quay.
- Nếu đổi cực tính (+ ↔ −), động cơ sẽ quay ngược lại.
- Tốc độ quay phụ thuộc mức điện áp cung cấp.
4. Thực hành: Điều khiển Động cơ DC bằng ESP32
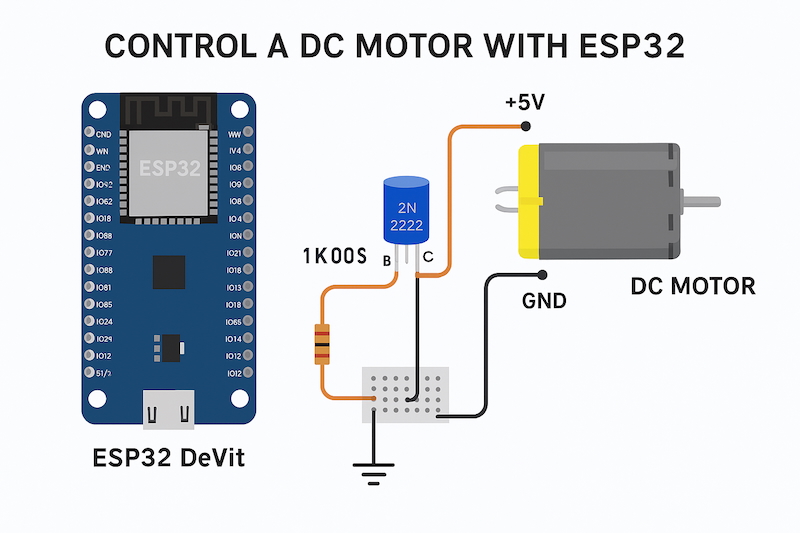
Sơ đồ mạch

| ESP32 Pin | Kết nối | Ghi chú |
|---|---|---|
| GPIO5 | Chân B transistor (qua điện trở 1kΩ) | Tín hiệu điều khiển |
| GND | Chân E transistor | Mass chung |
| Chân C transistor | Một đầu motor | |
| +5V | Đầu còn lại motor | Nguồn cấp động cơ |
Lưu ý: GND của ESP32 phải nối chung với GND nguồn motor.
Code mẫu
#define MOTOR_PIN 5
void setup() { pinMode(MOTOR_PIN, OUTPUT); }
void loop() {
digitalWrite(MOTOR_PIN, HIGH); delay(2000);
digitalWrite(MOTOR_PIN, LOW); delay(2000);
}
✅ Kết quả: Động cơ quay 2 giây – dừng 2 giây – lặp lại.
5. Mục tiêu học tập
- Hiểu được nguyên lý hoạt động cơ bản của động cơ DC.
- Biết đấu nối và lập trình điều khiển bật/tắt động cơ bằng ESP32.
- Chuẩn bị cho bài 2: Điều khiển tốc độ động cơ bằng PWM.
6. Câu hỏi củng cố
- Làm thế nào để đảo chiều quay của động cơ DC?
- Vì sao cần transistor để điều khiển motor bằng ESP32?
- Nếu muốn motor quay chậm hơn, bạn sẽ làm thế nào?
7. Linh kiện cần thiết
| Tên linh kiện | Số lượng | Ghi chú |
|---|---|---|
| ESP32 DevKit 38 Pin | 1 | Board điều khiển chính |
| Motor DC mini 3–6V | 1 | Dễ thử nghiệm |
| Transistor 2N2222 | 1 | Khuếch dòng |
| Điện trở 1kΩ | 1 | Giới hạn dòng |
| Breadboard + dây nối | – | |
| Nguồn 5V | 1 | Adapter hoặc pin |
Kết luận
Bài học đầu tiên giúp bạn nắm vững khái niệm, cấu tạo và nguyên lý hoạt động cơ bản của các loại động cơ. Đây là nền tảng quan trọng để bạn tiến tới các kỹ năng điều khiển nâng cao — từ điều khiển tốc độ, hướng quay, cho đến lập trình robot tự hành thông minh.
Để lại một bình luận