

(Khóa học: Lập trình & Điều khiển Động Cơ từ Cơ Bản tới Nâng Cao)
🎯 Mục tiêu bài học
Trong bài này, bạn sẽ hiểu nguyên lý hoạt động của hệ thống điều khiển từ xa cho robot dựa trên sóng RF 2.4GHz sử dụng module NRF24L01.
Đây là phần nền tảng giúp bạn hiểu cách truyền lệnh điều khiển từ tay cầm đến robot, chuẩn bị cho các phần tiếp theo về thiết kế phần cứng và lập trình thực tế.
⚙️ Nguyên lý hệ thống điều khiển RF cho Robot
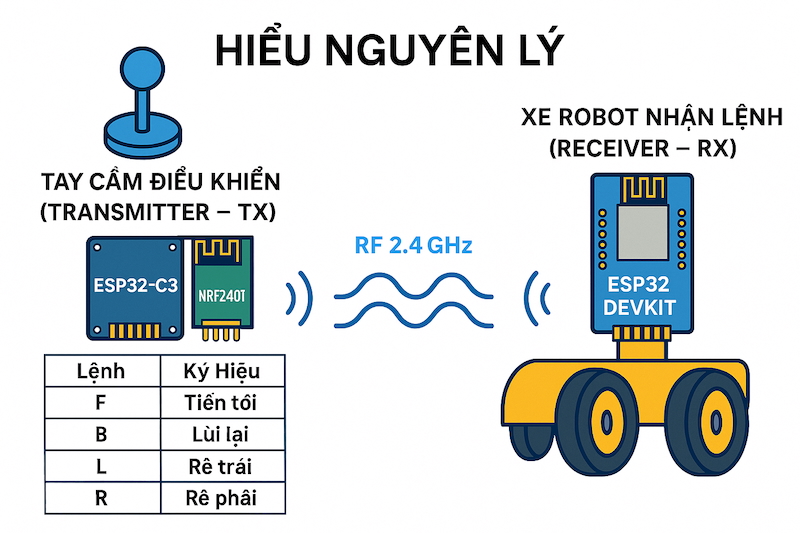
Hệ thống bao gồm hai khối chính:
🕹️ 1. Tay cầm điều khiển (Transmitter – TX)
- Gồm vi điều khiển ESP32-C3 và module NRF24L01.
- ESP32-C3 đọc tín hiệu từ các nút bấm hoặc joystick, sau đó mã hóa thành gói lệnh điều khiển.
- Gói lệnh này được gửi qua sóng RF (Radio Frequency) ở tần số 2.4GHz đến robot.
Ví dụ:
| Lệnh | Ký hiệu | Ý nghĩa |
|---|---|---|
| F | Forward | Tiến tới |
| B | Backward | Lùi lại |
| L | Left | Rẽ trái |
| R | Right | Rẽ phải |
| S | Stop | Dừng |
🚗 2. Xe robot nhận lệnh (Receiver – RX)
- Dùng ESP32 DevKit 38 Pin kết hợp với module NRF24L01 để nhận gói lệnh từ tay cầm.
- Khi nhận được lệnh, ESP32 giải mã và điều khiển driver L298N hoặc TB6612FNG để chạy động cơ theo hướng mong muốn.
- Ngoài ra, có thể điều khiển thêm đèn LED, còi báo, cảm biến vật cản…
🔄 Quy trình truyền dữ liệu RF
- Tay cầm (TX) đọc dữ liệu joystick/nút bấm.
- Tạo gói lệnh gồm hành động (action) và tốc độ (speed).
- NRF24L01 ở TX gửi gói lệnh tới NRF24L01 ở RX.
- NRF24L01 ở RX nhận gói, xác nhận (Auto-Ack) và gửi tới ESP32.
- ESP32 trên xe thực thi lệnh → robot di chuyển.
🧠 NRF24L01 hỗ trợ Auto-Ack (tự động xác nhận) và Auto-Retry (gửi lại khi lỗi), giúp tín hiệu truyền ổn định và giảm mất gói.
📡 Giới thiệu module NRF24L01
NRF24L01 là một module thu phát sóng không dây (wireless transceiver) hoạt động ở tần số 2.4GHz, do hãng Nordic Semiconductor sản xuất. Nó thường được sử dụng để truyền dữ liệu không dây giữa hai hoặc nhiều vi điều khiển (như Arduino, ESP32, STM32, v.v.) với tốc độ cao và công suất tiêu thụ thấp.
⚙️ Thông số kỹ thuật cơ bản:
| Thuộc tính | Giá trị |
|---|---|
| Tần số hoạt động | 2.4GHz ISM band |
| Tốc độ truyền | 250kbps, 1Mbps, 2Mbps |
| Điện áp hoạt động | 1.9 – 3.6V |
| Dòng tiêu thụ | 12–14mA khi TX |
| Khoảng cách truyền | 10–100m (tuỳ loại anten) |
| Giao tiếp | SPI |
| Hỗ trợ Auto Ack | Có |
| Số kênh RF | 125 kênh |
📦 Các phiên bản phổ biến:
- NRF24L01 thường: anten PCB, khoảng cách ngắn (~10m).
- NRF24L01+PA+LNA: có anten rời, khuếch đại tín hiệu mạnh hơn (100–1000m).
🔋 Nguyên lý hoạt động
NRF24L01 hoạt động theo mô hình 1 phát – 1 nhận (TX–RX) hoặc nhiều phát – 1 nhận (multi-node).
Mỗi module có thể đảm nhận một địa chỉ pipe riêng biệt để phân biệt kênh truyền.
👉 Trong dự án này:
- Tay cầm (TX) gửi dữ liệu đến pipe “ROBOT”.
- Robot (RX) mở kênh đọc pipe “ROBOT”, lắng nghe liên tục.
🧠 So sánh RF và các công nghệ khác
| Công nghệ | Tần số | Ưu điểm | Nhược điểm |
|---|---|---|---|
| RF (NRF24L01) | 2.4GHz | Độ trễ thấp, ổn định, tiết kiệm năng lượng | Cần thêm module |
| Wi-Fi (ESP-NOW) | 2.4GHz | Không cần module ngoài, tốc độ cao | Nhiễu nhiều nếu có Wi-Fi |
| Bluetooth (BLE) | 2.4GHz | Dễ dùng cho điện thoại | Độ trễ cao hơn RF |
| LoRa | 433–915MHz | Tầm xa, chống nhiễu tốt | Tốc độ thấp thường dùng nhiều cho truyền thông IoT tầm xa |
✅ Kết luận: NRF24L01 là lựa chọn tối ưu cho điều khiển robot trong lớp học hoặc thi đấu, vì trễ thấp, ổn định, và dễ lập trình.
🧰 Linh kiện cần cho bài học
| Linh kiện | Số lượng | Vai trò |
|---|---|---|
| ESP32-C3 | 1 | Tay cầm (Transmitter) |
| ESP32 DevKit 38 Pin | 1 | Xe nhận lệnh (Receiver) |
| NRF24L01 | 2 | Truyền – nhận tín hiệu RF |
| L298N / TB6612FNG | 1 | Điều khiển động cơ |
| Động cơ DC + bánh xe | 2 | Di chuyển |
| Nút bấm / joystick | 4 | Nhập lệnh |
| Pin + mạch sạc | 1 bộ | Cấp nguồn |
| Dây nối, breadboard | – | Lắp mạch thử nghiệm |
📈 Tổng kết bài học
Trong bài 1, bạn đã hiểu:
- Cấu trúc tổng thể của hệ thống RF điều khiển robot.
- Nguyên lý truyền nhận giữa tay cầm (TX) và xe robot (RX).
- Ưu điểm vượt trội của NRF24L01 so với các công nghệ không dây khác.
Phần tiếp theo, chúng ta sẽ thiết kế phần cứng chi tiết, kết nối các module NRF24L01, động cơ và nguồn điện — trong bài (phần 2): Thiết kế phần cứng.
Để lại một bình luận