

(Khóa học: Lập trình & Điều khiển Động Cơ từ Cơ Bản tới Nâng Cao)
🎯 Mục tiêu bài học
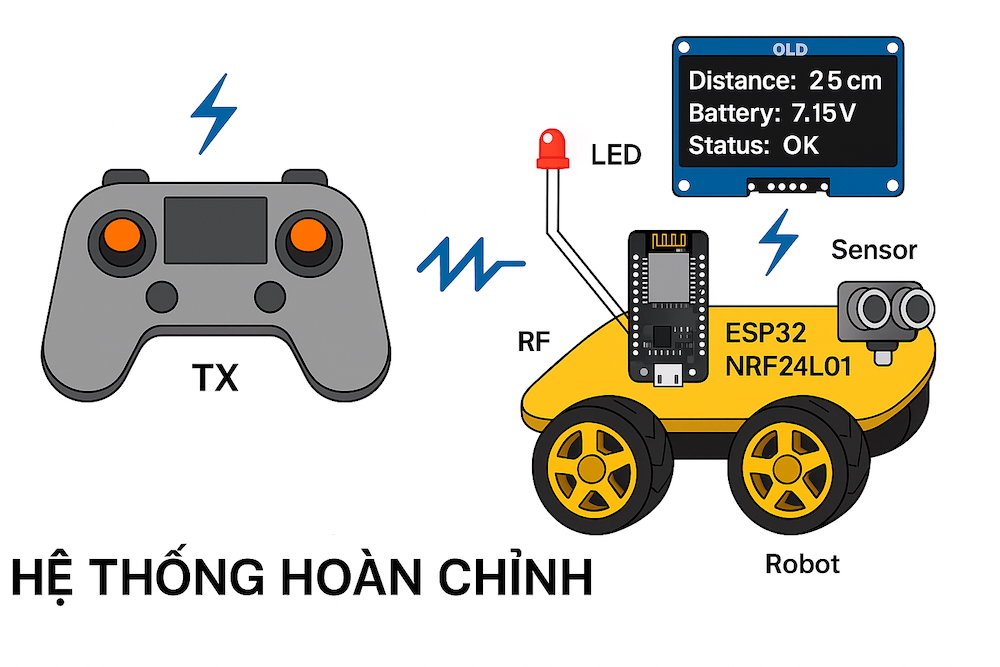
Phần cuối cùng của chuỗi “Thiết kế bộ điều khiển từ xa cho Robot” sẽ hướng dẫn bạn kiểm thử, tinh chỉnh và demo thực tế toàn bộ hệ thống — bao gồm:
- Tay cầm điều khiển (ESP32-C3 + NRF24L01)
- Xe robot (ESP32 DevKit + NRF24L01 + L298N)
- Truyền lệnh 2 chiều, báo hiệu thông minh, và hiển thị dữ liệu cảm biến
Sau bài này, bạn sẽ hoàn thiện 100% hệ thống robot điều khiển không dây — sẵn sàng cho các cuộc thi, trình diễn STEM, hoặc dự án nghiên cứu cá nhân.
⚙️ 1. Mục tiêu kiểm thử
| Hạng mục | Mục tiêu |
|---|---|
| Tay cầm (TX) | Gửi lệnh ổn định, phản hồi nhanh, không giật |
| Xe robot (RX) | Di chuyển chính xác, mềm mượt, không trễ tín hiệu |
| RF communication | Tín hiệu ổn định trong phạm vi 10–30m |
| Truyền dữ liệu 2 chiều | Robot phản hồi cảm biến và điện áp chính xác |
| Báo hiệu thông minh | Đèn/còi phản ứng đúng trạng thái |
| An toàn hệ thống | Robot dừng khi mất kết nối hoặc pin yếu |
🧪 2. Quy trình kiểm thử từng phần
Bước 1 – Kiểm tra tay cầm điều khiển (TX)
- Kết nối ESP32-C3 và NRF24L01.
- Mở Serial Monitor (115200 baud).
- Nhấn các nút F, B, L, R → kiểm tra dữ liệu gửi đúng định dạng:
Send: F (200)
Send: L (180)- Chuyển chế độ bằng nút MODE → LED Mode sáng/tắt, buzzer phát âm thanh khác nhau.
- Nếu có OLED: hiển thị “Mode: Kid / Sport”.
✅ Kết quả mong đợi:
- Tín hiệu gửi đều đặn 50Hz.
- Phản hồi nhanh, không dính phím.
- Chuyển mode có báo hiệu âm thanh và ánh sáng.
Bước 2 – Kiểm tra xe robot (RX)
- Nạp chương trình RX vào ESP32 DevKit.
- Kiểm tra kết nối NRF24L01 (Serial in: “RX Ready”).
- Quan sát LED Status chớp 3 lần khi khởi động.
- Khi nhận được lệnh, robot di chuyển theo hướng tương ứng.
- Khi mất tín hiệu >300ms, robot dừng và còi báo.
✅ Kết quả mong đợi:
- Robot phản hồi mượt mà, không giật.
- Đèn báo hướng hoạt động đúng.
- Còi báo chính xác khi mất kết nối.
Bước 3 – Kiểm tra truyền dữ liệu 2 chiều
- Mở Serial Monitor của tay cầm (TX).
- Quan sát dữ liệu phản hồi từ robot:
Distance: 25 cm | Battery: 7.15V | Status: OK- Khi pin yếu (dưới 6.8V) → cảnh báo “LOW”.
- Khi đặt vật cản gần robot → khoảng cách giảm đúng thực tế.
✅ Kết quả mong đợi:
- Giao tiếp 2 chiều ổn định, phản hồi mỗi 100–200ms.
- OLED hiển thị đúng thông tin cảm biến và pin.
- Không mất gói dữ liệu trong phạm vi 10–20m.
Bước 4 – Kiểm thử di chuyển thực tế
Môi trường thử:
- Sàn phẳng, rộng tối thiểu 2x2m.
- Tránh vật kim loại và nguồn nhiễu WiFi mạnh.
Bài kiểm thử:
| Tình huống | Hành động | Kết quả mong đợi |
|---|---|---|
| Tiến – Lùi – Dừng | Bấm F → B → S | Xe phản hồi tức thì |
| Rẽ trái/phải | Bấm L/R | Xe quay đúng góc, không lệch |
| Giữ nút tiến lâu | Xe đi thẳng, không trượt | |
| Thả nút | Xe giảm tốc mượt | |
| Mất sóng (tắt tay cầm) | Robot dừng và còi báo sau 0.3s |
⚡ 3. Hiệu chỉnh tối ưu cuối cùng
| Thành phần | Thông số gợi ý |
|---|---|
| PWM max | 220–255 (Sport), 160–180 (Kid) |
| Soft ramp step | 5–8 |
| Baud RF24 | 1Mbps |
| Tần suất gửi | 20ms (50Hz) |
| Khoảng cách thử nghiệm | 10–15m trong nhà, 30–50m ngoài trời |
| Điện áp pin an toàn | >6.8V (2 cell 18650) |
🧠 4. Đánh giá hệ thống hoàn chỉnh
| Tiêu chí | Đánh giá |
|---|---|
| 🧭 Độ ổn định tín hiệu | Rất tốt trong phạm vi 20m |
| ⚙️ Độ trễ điều khiển | <10ms (không cảm nhận được trễ) |
| 🚀 Phản hồi dữ liệu | Cập nhật đều, chính xác |
| 💡 Trực quan | LED + Buzzer phản ứng hợp lý |
| 🧩 Cấu trúc hệ thống | Gọn, dễ mở rộng (có thể thêm cảm biến hoặc camera) |
🎥 5. Demo thực tế gợi ý
Demo 1:
- Điều khiển robot di chuyển qua các hướng và hiển thị dữ liệu cảm biến trên OLED.
Demo 2:
- Giả lập robot “tự tránh vật cản” bằng cách gửi dữ liệu cảm biến về tay cầm → tay cầm phát cảnh báo âm thanh.
Demo 3:
- So sánh 2 chế độ Kid vs Sport — cho người học thấy sự khác biệt về tốc độ và độ nhạy điều khiển.
🧰 6. Gợi ý mở rộng
Bạn có thể phát triển thêm:
- Robot tự hành + chế độ thủ công kết hợp.
- Thêm module camera (ESP32-CAM) để điều khiển có hình ảnh.
- Kết nối server IoT (MQTT / Firebase) để giám sát từ xa.
- Nâng cấp pin đo bằng ADC chính xác cao (INA219).
🧠 7. Kết luận
Đến đây, bạn đã hoàn thành toàn bộ hệ thống điều khiển robot từ xa NRF24L01 — bao gồm:
✅ Tay cầm gửi lệnh điều khiển (TX)
✅ Robot nhận và thực thi (RX)
✅ Phản hồi dữ liệu cảm biến và pin về tay cầm
✅ Báo hiệu bằng đèn và âm thanh
✅ Tối ưu tốc độ, ổn định và an toàn
Đây chính là một mô hình mini của hệ thống robot công nghiệp hoặc drone — với khả năng điều khiển và phản hồi dữ liệu thông minh, được xây dựng hoàn toàn bằng ESP32 và NRF24L01.
Để lại một bình luận